|
|
Bachelor's Degree in Telecommunications Systems and in Network Engineering |
|
|
|
P12: using peripheral timer TMR2 |
| Resources in lectures and labs: | L12.1,Lab11, L12.2,L12.3 | Project | objectives |
4-bit serial transmitter with LCD display and TMR2
Design phases ==> #1:Serial_TX ==> #2: Serial_TX_LCD ==> #3:Serial_TX_LCD_TMR0 ==> #4: Serial_TX_LCD_TMR2
| 1. Specifications | Planning | Dev. & test | Prototype | Report |
Design phase #4: replace TMR0 in Serial_TX_LCD_TMR0 proposed in design phase #3, by the internal timer peripheral TMR2.
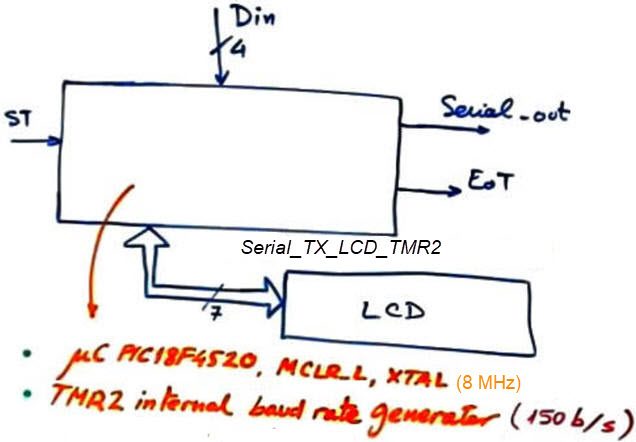 |
Fig. 1. Project Serial_TX_LCD_TMR2 symbol |
| Specifications | 2. Planning | Dev. & test | Prototype | Report |
A) Planning hardware
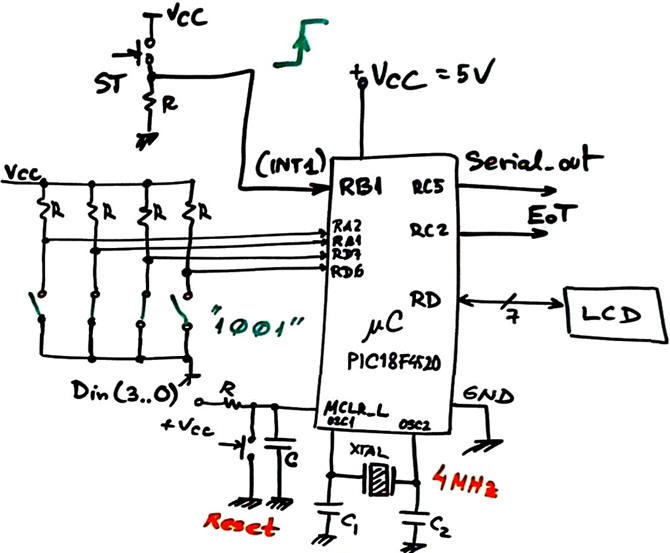
The electronic schematic is the same as in design phase #3, we simply replace an internal peripheral by another, thus keeping the same hardware circuit.
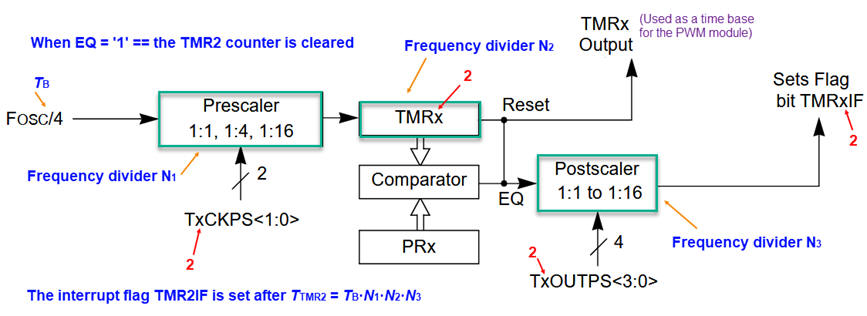
Study how the TMR2 works. It has an architecture that implements a hardwired parallel load (LD) signal or synchronous reset that makes it ideal for truncated counting using an additional 8-bit comparator. No software overhead is necessary in ISR() for reinitiating the up counter TMR2 when reaching the same value stored in PR2 register.
|
|
|
Fig 2. Hardware components (a kind of RTL view) of the TMR2 of the Microchip PIC18F4520. |
{kind=link}
The key idea for our application is to generate the same var_CLK_flag from TMR2 interrupts.
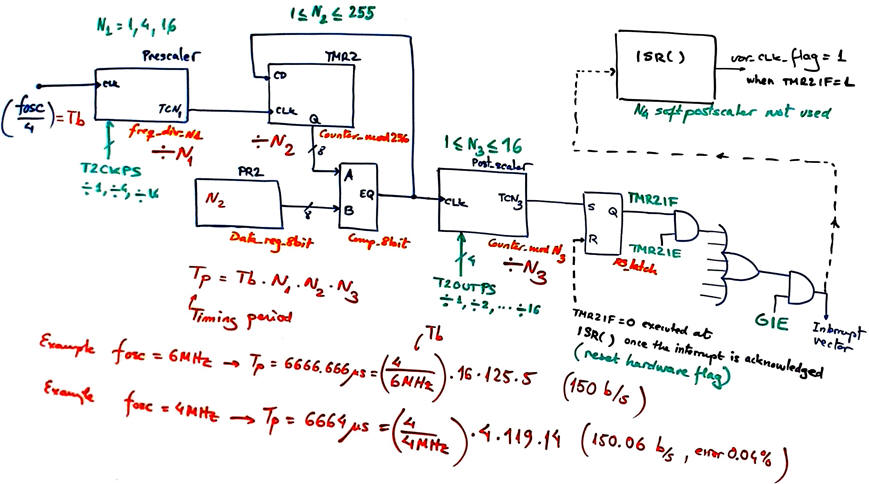 |
Fig. 2. TMR2 configuration for generating a timing period TP = 6.666 ms. In this application, no extra software post-scaler variable N4 is required. |
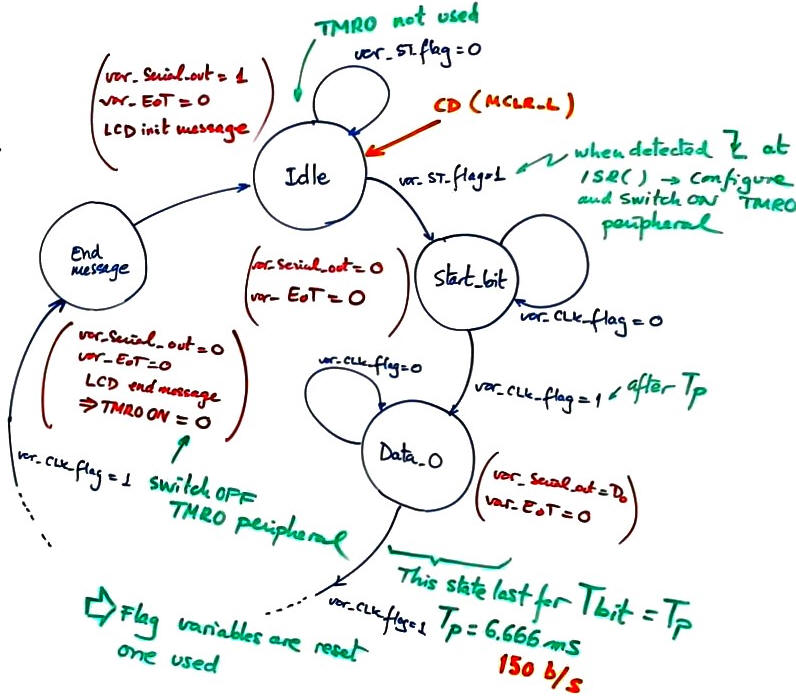
B) Planning software
No changes in the state diagram from design phase #3. We simply have to configure and use TMR2 at the same states where we did it for TMR0.
{kind=link}
Project location:
C:\CSD\P12\Serial_TX_LCD_TMR2\(files)
| Specifications | Planning | 3. Dev. & 4. test | Prototype | Report |
A) Developing hardware
Our electronic circuit "Serial_TX_LCD_TMR2.pdsprj" is the same that we developed in design phase #3 because we simple replace internal peripheral TMR0 by TMR2.
B) Developing software
The LCD kit software driver, these LCD library files "lcd.c", "lcd.h" , presented in P11, have to be included in the project. The file "config.h" contains all the microcontroller configuration bits. This is the example software source code "Serial_TX_LCD_TMR2.c". Start a new MPLABX project targeting the PCI18F46K22 and generate the executable (*.hex) and debugging file "*.cof" for Proteus simulations (or the "*.elf" for in-circuit debugging using for instance the MPLAB SNAP tool.
C) Step-by-step testing
We can run and debug the application using our usual resources and tools: breakpoints, step-mode, watching variables of interest, etc. For instance, Fig. 3 shows how to measure timing periods generated between TMR2 interrupts.
 |
Fig. 3. Measuring timing periods generated by TMR2 interrupts using breakpoints. There is an interrupt event every TP = 500 ns · 16 · 119 · 7 = 6664 μs as expected. |
| Specifications | Planning | Dev. & Test | 5. Prototype | Report |
This transmitter continues with the complete USART demonstration.
| Specifications | Planning | Dev. & Test | Prototype | 6. Report |
Follow this rubric for writing reports.
| Home Term 26/27-Q1 Contact Products Electronic devices and companies Software Books Magazines Instruments DEE Library EETAC DEEL |

|
|
| Web activa des de 09/2001, @ F. J. Robert, Web editat amb Microsoft Expression Web 4. El contingut és un complement als materials d'estudi del curs Circuits i Sistemes Digitals disponibles al campus digital Atenea. Llicència:Reconeixement 4.0 Internacional de Creative Commons |